
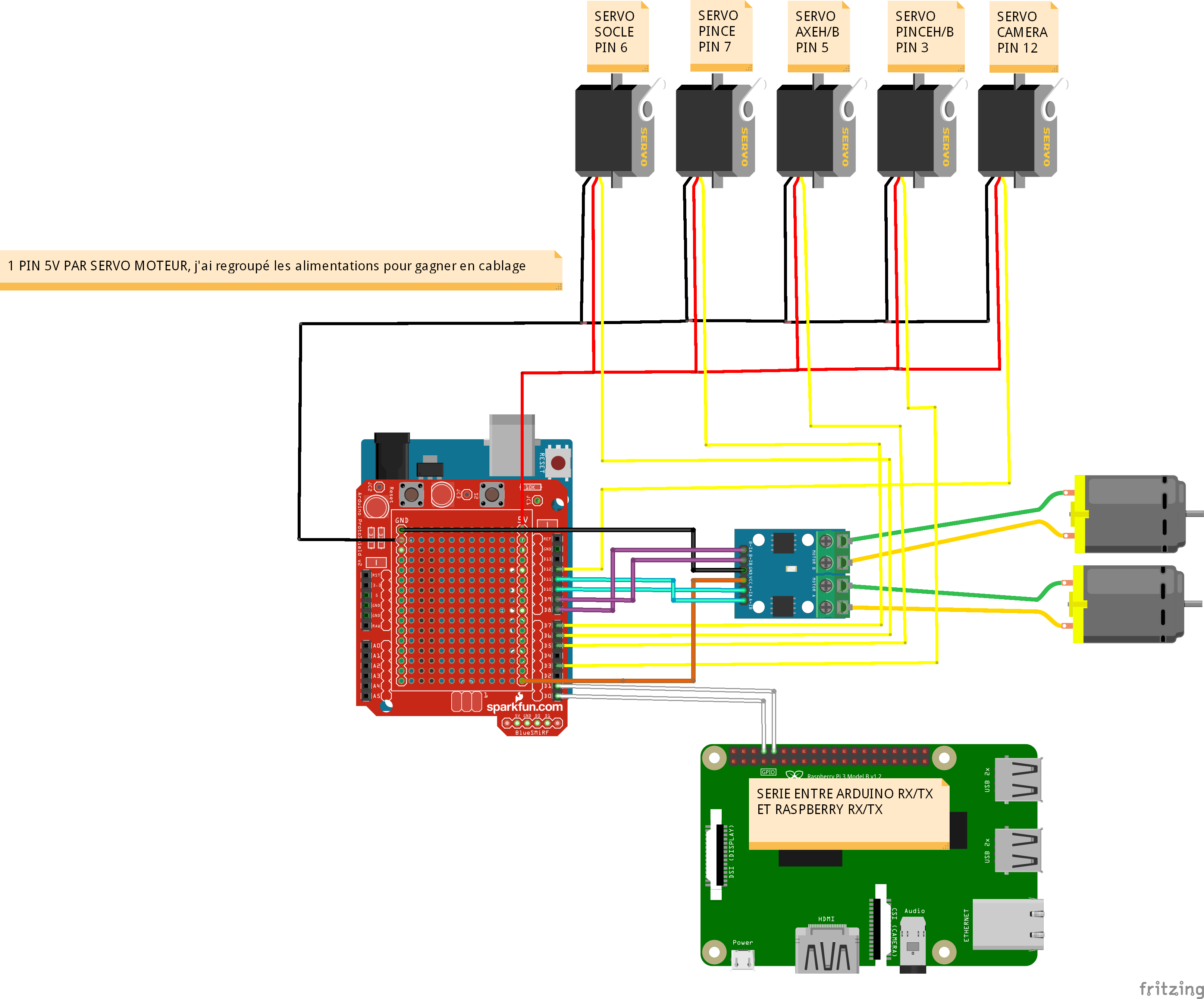
Plan et Schéma pour réaliser RaspCurioDuino from scratch, le principal avantage sur cette version et que on peut alimenter le drone via un powerbank disposant de 2 ports USB, l’arduino sera alimenté via son port serie en USB et le raspberry sera alimenté sur l’autre pose USB. La communication entre Raspberry et Arduino serra effectuée via les PIN GPIO RX/TX des deux péripéhriques.
Carte contrôleur pour deux moteurs courant continu compatible arduino L9110S H-pont

Un lot de cables dupont permettant de connecter les composants sur la breadboard du shield de prototypage

Le chassis type tank avec chenille avec les deux moteurs courant continu

Un Raspberry Pi Modèle 3 et sa coque permettant de les superposer avec l’arduino et facilite la ventilation dans le boitier.


Une clef Wifi compatible Raspberry permettant un accès réseau sans fils au raspberry

La caméra infrarouge pour la vision, compatible Raspberry et « Motion » sous Raspbian Stretch

Un servo moteur afin de permettre la rotation de la caméra

Un arduino UNO classique sur lequel on positionnera un shield de prototypage. Le Shield de prototypage permet d’avoir plus de PIN 5V et GND disponible pour les branchements de tout les modules.(Indispensable car l’arduino uno seul ne délivre pas assez de courant pour tout gérer correctement )
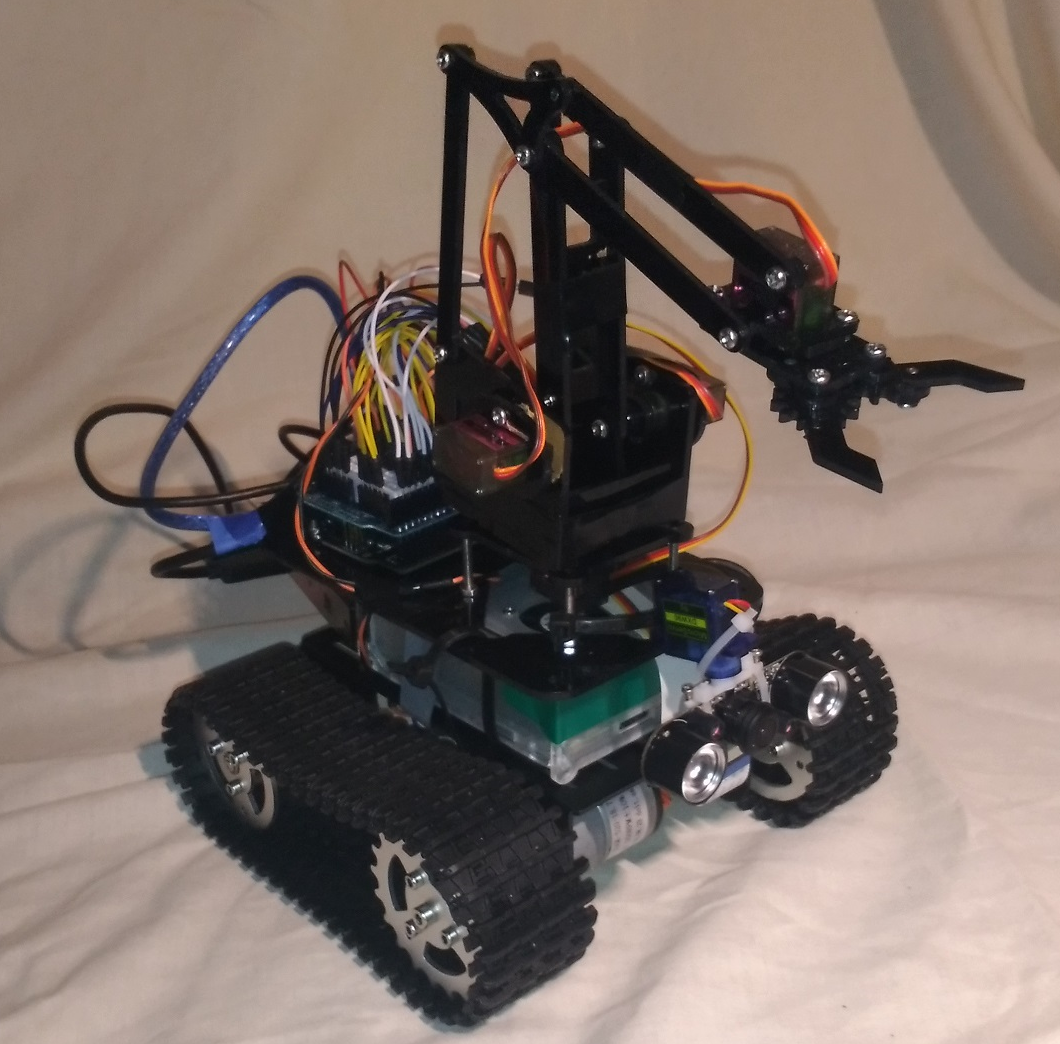
Afin de permettre des mouvements au robot j’ai ajouté ce bras robotique bon marché.
Montage Finale,
L’ensemble des sources de l’interface Web de contrôle hébergé sur Raspberry est disponible
Code à déployer dans l’Arduino, veillez à bien faire correspondre les PIN de chaque modules, pour l’expliquer brievement, l’arduino reste en écoute sur son port serie. Lorsqu’il recoit une chaine il va déclencher la fonction correspondante.
//string pour data from serial
String readString;
const int A1A = 10;//define pin 2 for A1A
const int A1B = 11;//define pin 3 for A1B
const int B1A = 8;//define pin 8 for B1A
const int B1B = 9;//define pin 9 for B1B
Servo monservosocle;
Servo monservopincehautbas;
Servo monservopince;
Servo monservoaxehautbas;
Servo monservocamera;
void setup(){
Serial.begin(9600);
pinMode(B1A,OUTPUT);// define pin as output
pinMode(B1B,OUTPUT);
pinMode(A1A,OUTPUT);
pinMode(A1B,OUTPUT);
pinMode(LED_BUILTIN, OUTPUT);
monservosocle.attach(6);
monservopince.attach(7);
monservoaxehautbas.attach(5);
monservopincehautbas.attach(3);
monservocamera.attach(12);
/*reinitialisation a la mise sous tansion*/
PivotRaz();
TeteMilieu();
monservoaxehautbas.write(0);
monservopincehautbas.write(180);
/*
delay(1000);
Lever();
*/
}
void loop(){
while (Serial.available()) {
delay(3);
char c = Serial.read();
readString += c;
}
readString.trim();
if (readString.length() >0) {
Serial.println(readString);
if (readString == "on"){
BlinkLed();
}
if (readString == "leverpince"){
ControlePince(readString);
}
if (readString == "baisserpince"){
ControlePince(readString);
}
if (readString == "replierpince"){
ControlePince(readString);
}
if (readString == "droitepince"){
ControlePince(readString);
}
if (readString == "gauchepince"){
ControlePince(readString);
}
if (readString == "lever"){
Lever();
}
if (readString == "saisir"){
Saisir();
}
if (readString == "lacher"){
Lacher();
}
if (readString == "pivotdroite"){
PivotDroite();
}
if (readString == "pivotgauche"){
PivotGauche();
}
if (readString == "pivotraz"){
PivotRaz();
}
if (readString == "avancerdrone"){
AvancerDrone();
}
if (readString == "reculerdrone"){
ReculerDrone();
}
if (readString == "stoperdrone"){
StoperDrone();
}
if (readString == "droitedrone"){
DroiteDrone();
}
if (readString == "gauchedrone"){
GaucheDrone();
}
if (readString == "debloquerdrone"){
DebloquerDrone();
}
if (readString == "tetedroite"){
TeteDroite();
}
if (readString == "tetegauche"){
TeteGauche();
}
if (readString == "tetemilieu"){
TeteMilieu();
}
if (readString == "balayagetete"){
BalayageTete();
}
}
readString ="";
}
void Lever()
{
Serial.println("Lever");
monservopincehautbas.write(5);
delay(700);
monservoaxehautbas.write(30);
delay(700);
Saisir();
Serial.println("Saisir durant 1sec5");
delay(1500);
Lacher();
delay(1500);
Serial.println("Dessendre");
monservoaxehautbas.write(0);
delay(700);
monservopincehautbas.write(180);
}
void ControlePince(String action)
{
int val;
Serial.println(action);
int CurrentPositionpincehautbas = monservopincehautbas.read();
int CurrentPositionaxehautbas = monservoaxehautbas.read();
int CurrentPositionsocle = monservosocle.read();
int MAXpincehautbas = 178;
int MINpincehautbas = 10;
int MAXaxehautbas = 120;
int MINaxehautbas = 2;
int MAXsocle = 180;//position initiale
int MINsocle = 0;
if (action == "droitepince"){
if(CurrentPositionsocle-5 > MINsocle){
CurrentPositionsocle=CurrentPositionsocle-5;
monservosocle.write(CurrentPositionsocle);
}
}
if (action == "gauchepince"){
if(CurrentPositionsocle+5 < MAXsocle){
CurrentPositionsocle=CurrentPositionsocle+5;
monservosocle.write(CurrentPositionsocle);
}
}
if (action == "leverpince"){
if(CurrentPositionaxehautbas+4 < MAXaxehautbas){
CurrentPositionaxehautbas=CurrentPositionaxehautbas+4;
monservoaxehautbas.write(CurrentPositionaxehautbas);
}
if(CurrentPositionpincehautbas-10 > MINpincehautbas){
CurrentPositionpincehautbas=CurrentPositionpincehautbas-10;
monservopincehautbas.write(CurrentPositionpincehautbas);
}
}
if (action == "baisserpince"){
if(CurrentPositionaxehautbas-10 > MINaxehautbas){
CurrentPositionaxehautbas=CurrentPositionaxehautbas-10;
monservoaxehautbas.write(CurrentPositionaxehautbas);
}
if(CurrentPositionpincehautbas+10 < MAXpincehautbas){
CurrentPositionpincehautbas=CurrentPositionpincehautbas+10;
monservopincehautbas.write(CurrentPositionpincehautbas);
}
}
if (action == "replierpince"){
for (int position = CurrentPositionaxehautbas; position > MINaxehautbas; position--) {
monservoaxehautbas.write(position);
Serial.println(position);
delay(10);
}
for (int position = CurrentPositionpincehautbas; position < MAXpincehautbas; position++) {
monservopincehautbas.write(position);
Serial.println(position);
delay(10);
}
for (int position = CurrentPositionsocle; position <= 90; position++) {
monservosocle.write(position);
Serial.println(position);
delay(10);
}
}
}
void Saisir()
{
Serial.println("Saisir");
monservopince.write(180);
}
void Lacher()
{
Serial.println("Lacher");
monservopince.write(150);
}
void PivotGauche()
{
int CurrentPositionmonservosocle = monservosocle.read();
int Maxmonservosocle = 179;
if(CurrentPositionmonservosocle+5 <= Maxmonservosocle){
int NewPosition = CurrentPositionmonservosocle+5;
monservosocle.write(NewPosition);
Serial.println("PivotGauche"+NewPosition);
}
}
void PivotDroite()
{
int CurrentPositionmonservosocle = monservosocle.read();
int Minmonservosocle = 1;
if(CurrentPositionmonservosocle-5 >= Minmonservosocle){
int NewPosition = CurrentPositionmonservosocle-5;
monservosocle.write(NewPosition);
Serial.println("PivotDroite" + NewPosition);
}
}
void PivotRaz()
{
Serial.println("PivotRaz -> 90");
monservosocle.write(90);
}
void AvancerDrone()
{
Serial.println("Avancer");
motorA('R');// Turn motor A to RIGHT
motorB('R'); // Turn motor A to RIGHT
}
void ReculerDrone()
{
Serial.println("Reculer");
motorA('L');// Turn motor A to RIGHT
motorB('L'); // Turn motor A to RIGHT
}
void StoperDrone()
{
Serial.println("Stoper");
motorA('O');// Turn motor A OFF
motorB('O');// Turn motor B OFF
}
void DroiteDrone()
{
Serial.println("Debloquer");
motorB('R');// Turn motor B to RIGHT
motorA('L');// Turn motor B to LEFT
}
void GaucheDrone()
{
Serial.println("Debloquer");
motorB('L');// Turn motor B to RIGHT
motorA('R');// Turn motor B to LEFT
}
void DebloquerDrone()
{
Serial.println("Debloquer");
motorB('L');// Turn motor B to RIGHT
motorA('R');// Turn motor B to LEFT
delay(1500) ;
StoperDrone();
}
void TeteGauche()
{
int CurrentPositionmonservocamera = monservocamera.read();
int Minmonservocamera = 60;
if(CurrentPositionmonservocamera-5 >= Minmonservocamera){
int NewPosition = CurrentPositionmonservocamera-5;
monservocamera.write(NewPosition);
Serial.println("TeteGauche ");
Serial.println(NewPosition);
}
}
void TeteDroite()
{
int CurrentPositionmonservocamera = monservocamera.read();
int Maxmonservocamera = 120;
if(CurrentPositionmonservocamera+5 <= Maxmonservocamera){
int NewPosition = CurrentPositionmonservocamera+5;
monservocamera.write(NewPosition);
Serial.println("TeteDroite ");
Serial.println(NewPosition);
}
}
void TeteMilieu()
{
Serial.println("TeteMilieu");
monservocamera.write(90);
Serial.println(monservocamera.read());
}
void BalayageTete(){
int CurrentPositionmonservocamera = monservocamera.read();
for (int position = CurrentPositionmonservocamera; position <= 110; position++) {
monservocamera.write(position);
Serial.println(position);
delay(60);
}
CurrentPositionmonservocamera = monservocamera.read();
for (int position = 110; position >= 65; position--) {
monservocamera.write(position);
Serial.println(position);
delay(60);
}
monservocamera.write(90);
}
void BlinkLed()
{
digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(LED_BUILTIN, LOW); // turn the LED off by making the voltage LOW
delay(1000);
}
/*
* @motorA
* activation rotation of motor A
* d is the direction
* R = Right
* L = Left
*/
void motorA(char d)
{
if(d =='R'){
digitalWrite(A1A,LOW);
digitalWrite(A1B,HIGH);
}else if (d =='L'){
digitalWrite(A1A,HIGH);
digitalWrite(A1B,LOW);
}else{
//Robojax.com L9110 Motor Tutorial
// Turn motor OFF
digitalWrite(A1A,LOW);
digitalWrite(A1B,LOW);
}
}// motorA end
/*
* @motorB
* activation rotation of motor B
* d is the direction
* R = Right
* L = Left
*/
void motorB(char d)
{
if(d =='R'){
digitalWrite(B1A,LOW);
digitalWrite(B1B,HIGH);
}else if(d =='L'){
digitalWrite(B1A,HIGH);
digitalWrite(B1B,LOW);
}else{
//Robojax.com L9110 Motor Tutorial
// Turn motor OFF
digitalWrite(B1A,LOW);
digitalWrite(B1B,LOW);
}
}// motorB end
Configuration du Raspberry avec le dongle Wifi
Branchez la clef Wifi sur le Raspberry, démarrez le puis consulter la liste des périphériques afin de déterminer si il est correctement détecte.
Bus 001 Device 006: ID 2341:0043 Arduino SA Uno R3 (CDC ACM)
Bus 001 Device 005: ID 0bda:8179 Realtek Semiconductor Corp. RTL8188EUS 802.11n Wireless Network Adapter
Bus 001 Device 004: ID 05e3:0610 Genesys Logic, Inc. 4-port hub
Bus 001 Device 003: ID 0424:ec00 Standard Microsystems Corp. SMSC9512/9514 Fast Ethernet Adapter
Bus 001 Device 002: ID 0424:9514 Standard Microsystems Corp. SMC9514 Hub
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
La clef est detectée sur : Bus 001 Device 005 Realtek Semiconductor Corp. RTL8188EUS 802.11n Wireless Network Adapter
On va récupérer le nom de la clef wifi avec ip addr, ici pour moi il s’agit de wlan0
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
inet6 ::1/128 scope host
valid_lft forever preferred_lft forever
2: eth0: <NO-CARRIER,BROADCAST,MULTICAST,UP> mtu 1500 qdisc pfifo_fast state DOWN group default qlen 1000
link/ether 41-03-20-49-54-E0 brd ff:ff:ff:ff:ff:ff
3: wlan0: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc mq state UP group default qlen 1000
link/ether 41-03-20-49-54-E0 brd ff:ff:ff:ff:ff:ff
inet 192.168.1.31/24 brd 192.168.1.255 scope global wlan0
valid_lft forever preferred_lft forever
inet6 fe80::123e:aaee:fe3b:2875/64 scope link
valid_lft forever preferred_lft forever
4: wlan1: <BROADCAST,MULTICAST> mtu 1500 qdisc noop state DOWN group default qlen 1000
link/ether 41-03-20-49-54-E0 brd ff:ff:ff:ff:ff:ff
Avec le nom de la clee wlan0 je vais indiquer au raspberry de connecter directement au boot la clef USB sur ma freebox
# Please note that this file is written to be used with dhcpcd
# For static IP, consult /etc/dhcpcd.conf and 'man dhcpcd.conf'
# Include files from /etc/network/interfaces.d:
source-directory /etc/network/interfaces.d
auto lo
iface lo inet loopback
auto eth0
iface eth0 inet dhcp
allow-hotplug wlan0
auto wlan0
iface wlan0 inet dhcp
wpa-ssid "Lessiddevotrereseauwifi"
wpa-psk "masuperclefpourprotegermonwifi"
Redémarrez le raspberry et déconnectez votre câble réseau pour vérifier, votre dhcp doit vous délivrer une nouvelle adresse, reprenez la main via ssh sur le raspberry via cette adresse.
Configuration de la Camera avec Motion
Éteignez le raspberry, puis connectez la camera sur la board et reprenez la main via ssh.
Il faut activer la camera dans la configuration de raspbian avec
Dans le Menu, Onglet 5 : « Interfacing Options », le P1 désigne la camera, faite enable puis valider les modifications et rebootez le raspberry.
Après re-démarrage on vérifie que la camera fonctionne avec la commande raspistill qui vous génère dans le dossier courant une image appelé test.jpg
On install le paquet Motion qui va permettre de stream la vue de la camera
sudo apt-get upgrade
sudo apt-get install motion
sudo modprobe bcm2835-v4l2
A la fin du fichier ajouter la ligne :
#
#
bcm2835-v4l2
On active le daemon Motion
#
start_motion_daemon=yes
On fait une copie du fichier de configuration initiale et on édite le notre
#Autoriser le daemon motion
daemon on
# Emplacement du fichier de log de motion
logfile /tmp/motion.log
# on autorise de consulter le steam video depuis le lan
stream_localhost off
# desactive enregistrement photo video
output_pictures off
ffmpeg_output_movies off
# definis le framerate du stream
framerate 50
# largeur et hauteur de la video
width 640
height 480
# port de controle admin pour motion
webcontrol_port 8081
on démarre le service avec
A présent le flux de votre camera doit être disponible sur http://ip.du.rasp.berry:8080, sur http://ip.du.rasp.berry:8081 est disponible l’administration
Connection Serie Raspberry vers Arduino
Notre objectif étant de pouvoir piloter notre arduino via le raspberry celui-ci va dialoguer avec le port serie.
Je liste l’ensemble avec ls -la /dev, je dois trouver
Il s’agit du port serie raspberry/arduino par défaut, on peut tester si il s’agit du bon port avec un script python
# coding: utf-8
import sys # pour la gestion des parametres
import serial # bibliothèque permettant la communication série
#print str(sys.argv[1])
ser = serial.Serial('/dev/serial0', 9600)
print str(sys.argv[1])
ser.write(str(sys.argv[1]))
Puis on essaye d’envoyer une commande a l’arduino, il s’agit ici d’un des mots clefs que doit reconnaitre l’arduino, dans mon exemple je ferai. Ce qui déclencherai la fonction « lever » sur l’arduino
Le bras robotique sur contrôlé par l’arduino doit alors effectuer le mouvement demandé.
Serveur Web pour commander Arduino
L’interface WEB va simplement faire exécuter les commandes python testé ci-dessus.
cd /var/www/html/
sudo git clone https://github.com/VeilleurTrytoFix/RaspCurioDuino
sudo chown -R www-data:www-data /var/www/html/
#deplacement du fichier server pour le websocket
mv ./server.js /home/monuser/
Modifier l’adresse ip dans index.php pour faire correspondre avec celle du raspberry pour le retour camera.
On va autoriser l’utilisateur www-data de apache2 à executer des scripts avec sudo, car sinon www-data n’a pas les droits pour accéder au port serie /dev/serial0
Le fichier complet avec la modification donne :
# This file MUST be edited with the 'visudo' command as root.
#
# Please consider adding local content in /etc/sudoers.d/ instead of
# directly modifying this file.
#
# See the man page for details on how to write a sudoers file.
#
Defaults env_reset
Defaults mail_badpass
Defaults secure_path="/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin"
# Host alias specification
# User alias specification
# Cmnd alias specification
# User privilege specification
root ALL=(ALL:ALL) ALL
www-data ALL=(ALL) NOPASSWD:ALL
# Allow members of group sudo to execute any command
%sudo ALL=(ALL:ALL) ALL
# See sudoers(5) for more information on "#include" directives:
#includedir /etc/sudoers.d
Lancement du Server websocket
#retourne
Wed Jan 16 2019 17:28:13 GMT+0000 (Coordinated Universal Time) Server is listening on port 1337
open serial communication
Wed Jan 16 2019 17:30:33 GMT+0000 (Coordinated Universal Time) Connection accepted.
Résolution d’incidents :
npm ERR! at errorResponse (/usr/share/npm/lib/cache/add-named.js:260:10)
npm ERR! at /usr/share/npm/lib/cache/add-named.js:203:12
npm ERR! at saved (/usr/share/npm/node_modules/npm-registry-client/lib/get.js:167:7)
npm ERR! at FSReqWrap.oncomplete (fs.js:135:15)
npm ERR! If you need help, you may report this *entire* log,
npm ERR! including the npm and node versions, at:
npm ERR! <http://github.com/npm/npm/issues>
#Résolu avec un upgrade de nodejs vers la last lts version (11 actu)
curl -sL https://deb.nodesource.com/setup_11.x | sudo -E bash -